- Home
- OFweek News
- Focusing on Application Pain Points, FLEXIV's Adaptive Robots Drive Innovation in Grinding Automation
Focusing on Application Pain Points, FLEXIV's Adaptive Robots Drive Innovation in Grinding Automation
Published: February 27, 2025 17:28
Unlike traditional industrial robot automation applications, grinding automation has always been a technical challenge. FLEXIV, with years of continuous breakthroughs in robotic technology and deep understanding of process scenarios, has provided a new solution for grinding automation through its adaptive robots.
So, how do FLEXIV's adaptive robots drive flexible grinding automation, achieving a balance of "rigidity and flexibility" while effectively solving pain points in related scenarios? Below is an in-depth share from FLEXIV's Surface Treatment Application Expansion Manager, Zhu Lei.
Grinding Automation Faces Multiple Challenges
From a macro perspective, grinding automation is constrained by three major factors: grinding consumables, grinding tools, and actuators. Meanwhile, the quality of the grinding process directly impacts the final manufacturing results.
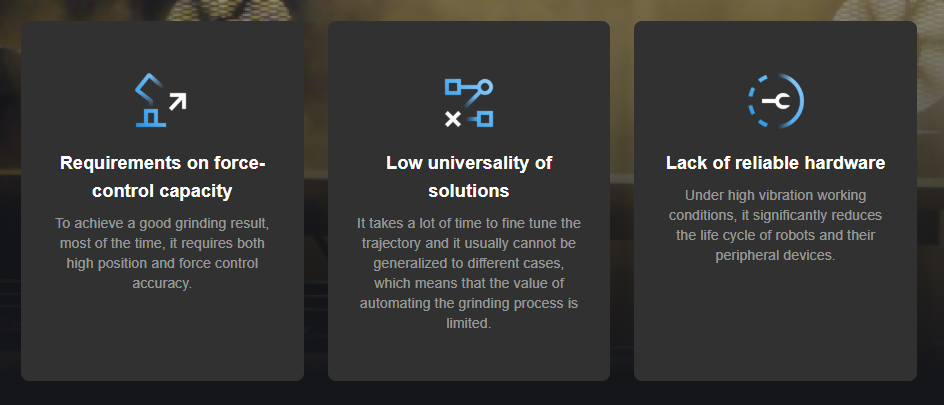
First, industrial grinding inevitably generates cumulative errors during operation. If the automation solution fails to effectively address these errors, it may result in poor grinding quality, or even damage to the workpiece or tools.
Second, the wide variety of grinding processes, involving different workpieces, operation routes, and standards, presents a significant challenge to the universality of automation solutions. While specialized equipment can address specific process requirements, it often comes with high costs.
Lastly, existing automation solutions have various inconveniences in trajectory generation, hardware and software setup, which severely reduce deployment efficiency and user experience.
Breakthrough Based on Human-like Principles
To achieve high-quality grinding results, robotic grinding automation solutions need to find a delicate balance between grinding force, robot travel speed (also known as "line speed"), and tool rotation speed.
As an innovator in the robotics field, FLEXIV, based on human-like technology principles, uses a work method that is primarily force-adjustment-based with visual guidance as a secondary element. This enables the adaptive robot to have high tolerance for positional errors, strong anti-interference capability, and intelligent adaptability, allowing it to self-adjust to the object, environment, and task. FLEXIV’s adaptive robots require minimal dependence on non-standard mechanisms or structured environments in grinding automation tasks.
The core technology of the adaptive robot is based on two major capabilities: cutting-edge industrial-grade force control technology and innovative hierarchical intelligence systems. Each joint of FLEXIV’s adaptive robot is equipped with high-precision force/torque sensors, with force sensing resolution as high as 0.03N and a 1kHz force control frequency response, combined with advanced force control algorithms. This enables the robot to achieve superior industrial-grade force control performance and handle force-based complex applications.
By deeply integrating AI, FLEXIV’s adaptive robot can efficiently perform hand-eye coordination tasks, forming a hierarchical intelligent system: “perception” (touch) → “control” (muscle) → “planning” (cerebellum) → “decision-making” (brain), helping the robot accumulate general skills and knowledge.
In practical use, FLEXIV has introduced the concept of “primitive operations”, breaking down complex tasks into indivisible basic operations. Engineers can easily program the robot’s tasks by chaining these "primitive operations."
Adaptive Robots Drive Flexible Grinding Automation
Flexible Application of Multiple Force Control Strategies
With powerful force control capabilities and advanced whole-machine force control algorithms, FLEXIV’s adaptive robots can flexibly apply multiple force control strategies for grinding. The robots can easily follow complex surfaces, with the end-effector precisely aligning with the workpiece surface to ensure stable and real-time force output during grinding.
In actual operations, the adaptive robots can achieve multi-directional positional compensation, maintaining omnidirectional force control. Additionally, the grinding soft limit feature can restrict end-effector trajectory deviation, significantly improving the precision of grinding paths. Moreover, the high-frequency and high-precision force control capabilities allow the robot to effectively adapt to the differences in individual workpieces, ensuring precise prevention of over-cutting.
Optimizing Human-Machine Interaction Experience
To further enhance the user experience, FLEXIV has developed the Flexiv Elements graphical programming software. With the ability to manage “primitive operations,” users can easily complete tasks such as dragging the robotic arm to teach trajectories, offline programming simulations, and real-time surface and contour matching.
Flexiv Elements comes with many modular process software packages, supporting complex motion trajectories and the superimposition of grinding paths, including, but not limited to, spiral lines, zigzag shapes, gradual expansion lines, and random curves.
Additionally, the adaptive robot supports force-controlled grinding by holding the workpiece. Using the external TCP (ECP) method simplifies the teaching process, quickly generates precise grinding trajectories, and significantly improves trajectory accuracy. The grinding process software also supports multi-angle grinding, focusing on entry and exit points to ensure consistent results throughout the grinding process.
Through theoretical algorithms and underlying modeling, FLEXIV’s robotic arm torque control can reduce vibrations by 25% to 50%, improving operational stability and extending the robot's working lifespan in harsh environments. Filtering and absorption functions also help manage high-frequency jitter, protecting key components like sensors and reducers in the joints.
Conclusion
With its exceptional technological strength and deep industry experience, FLEXIV has successfully launched various flexible grinding automation solutions based on force control strategies. These solutions are widely used in industries such as 3C electronics and automotive manufacturing, earning unanimous recognition from customers.